GD with adaptive step-size
Let
represent a quadratic cost functional, where Op, in particular, is given by
\( \mbox{Op}(\mathbf{u}) = A \mathbf{u} \qquad \) (matrix times vector)
Import F2O
import F2O.F2O_utils as F2O
from F2O.fwOp.fwOperator import fwOp
from F2O.F2O_sptl import gd
import demo.synthData as sd
# Other imports
import matplotlib.pylab as PLT
---------------------------------------------------------------------------
ModuleNotFoundError Traceback (most recent call last)
/tmp/ipykernel_335/96989614.py in <module>
----> 1 import F2O.F2O_utils as F2O
2 from F2O.fwOp.fwOperator import fwOp
3 from F2O.F2O_sptl import gd
4
5 import demo.synthData as sd
ModuleNotFoundError: No module named 'F2O'
Synthetic data for \( \mbox{Op}(\mathbf{u}) = A \mathbf{u}\)
Generate data involving a square random matrix and a random vector
\( \small \qquad \begin{array}{rcl} B & = & \mbox{randn}(N,N) \\ A & = & B^TB + \alpha\cdot\mbox{diag}(N) \\ A[:,k] & /= & \| A[:,k] \|_2 \;\; \forall k \qquad \mbox{ (normalization step)} & \\ \mathbf{u}^* & = & \mbox{randn}(N,1) \\ & \\ b & = & A\mathbf{u}^* + \sigma\cdot \mbox{randn}(N,1) \end{array}\)
N = 2000
synthData = sd.synthData()
A, b, xori = synthData.genDataMV(N, alpha=0.1*N)
Step by step setup
GD’s step-size can be automatically determine.
Cauchy step-size
Barzilai-Borwein
etc.
Set the arguments that define the optimization problem
args = F2O.argsF2O() # NOTE: use args = F2O.argsF2O(enableJAX=False)
# to disbale JAX support
args.verbose = True
args.fCostClass = args.f2oDef.cost_L2_lin # F(x) = 0.5|| Op(x) - b ||_2^2, where Op(.) is lineal
args.freqSol = False
Select the forward operator
Op = fwOp()
Op.linOp = args.f2oDef.fAx_matrixvec # matrix times vector
Op.A = A
Call the routine to solve the problem
ssCte = [5e-2, 5e-3, 5e-4]
ssPolicy = [args.f2oDef.ss_Cte,
args.f2oDef.ss_BBv2,
args.f2oDef.ss_Cauchy]
nIter = 100
x = []
gdStats = []
args.verbose = False
for k in range(len(ssPolicy)):
args.ssPoliciy = ssPolicy[k]
if args.ssPoliciy == args.f2oDef.ss_Cte:
args.ssCte = ssCte[k] # see GD_ex1.ipynb
else:
args.ssCte = 0.0
sol = gd(Op, b, nIter, args)
x.append(sol[0])
gdStats.append(sol[1])
WARNING:absl:No GPU/TPU found, falling back to CPU. (Set TF_CPP_MIN_LOG_LEVEL=0 and rerun for more info.)
Plot results: cost functional evolution
fig = PLT.figure(figsize=(24, 16))
ax1 = fig.add_subplot(2, 1, 1)
for k in range(len(ssPolicy)):
if ssPolicy[k] == args.f2oDef.ss_Cte:
PLT.plot(gdStats[k][:,0], label=r'$\alpha_k$ = {0} -- {1}'.format(ssCte[k], args.f2oDef.ss_list[ssPolicy[k]]) )
else:
PLT.plot(gdStats[k][:,0], label=r'$\alpha_k$ : {0}'.format(args.f2oDef.ss_list[ssPolicy[k]]) )
PLT.legend(loc='upper right',fontsize=20)
PLT.ylabel(r'$f(x) = \frac{1}{2} \|\| $Op$(\mathbf{u}) - \mathbf{b} \|\|_2^2$',fontsize=20)
PLT.xlabel('Iteration',fontsize=20)
ax2 = fig.add_subplot(2, 1, 2)
for k in range(len(ssPolicy)):
if ssPolicy[k] == args.f2oDef.ss_Cte:
PLT.plot(gdStats[k][:,2], gdStats[k][:,0], label=r'$\alpha_k$ = {0} -- {1}'.format(ssCte[k], args.f2oDef.ss_list[ssPolicy[k]]) )
else:
PLT.plot(gdStats[k][:,2], gdStats[k][:,0], label=r'$\alpha_k$ : {0}'.format(args.f2oDef.ss_list[ssPolicy[k]]) )
PLT.legend(loc='upper right',fontsize=20)
PLT.ylabel(r'$f(x) = \frac{1}{2} \|\| $Op$(\mathbf{u}) - \mathbf{b} \|\|_2^2$',fontsize=20)
PLT.xlabel('Time',fontsize=20);
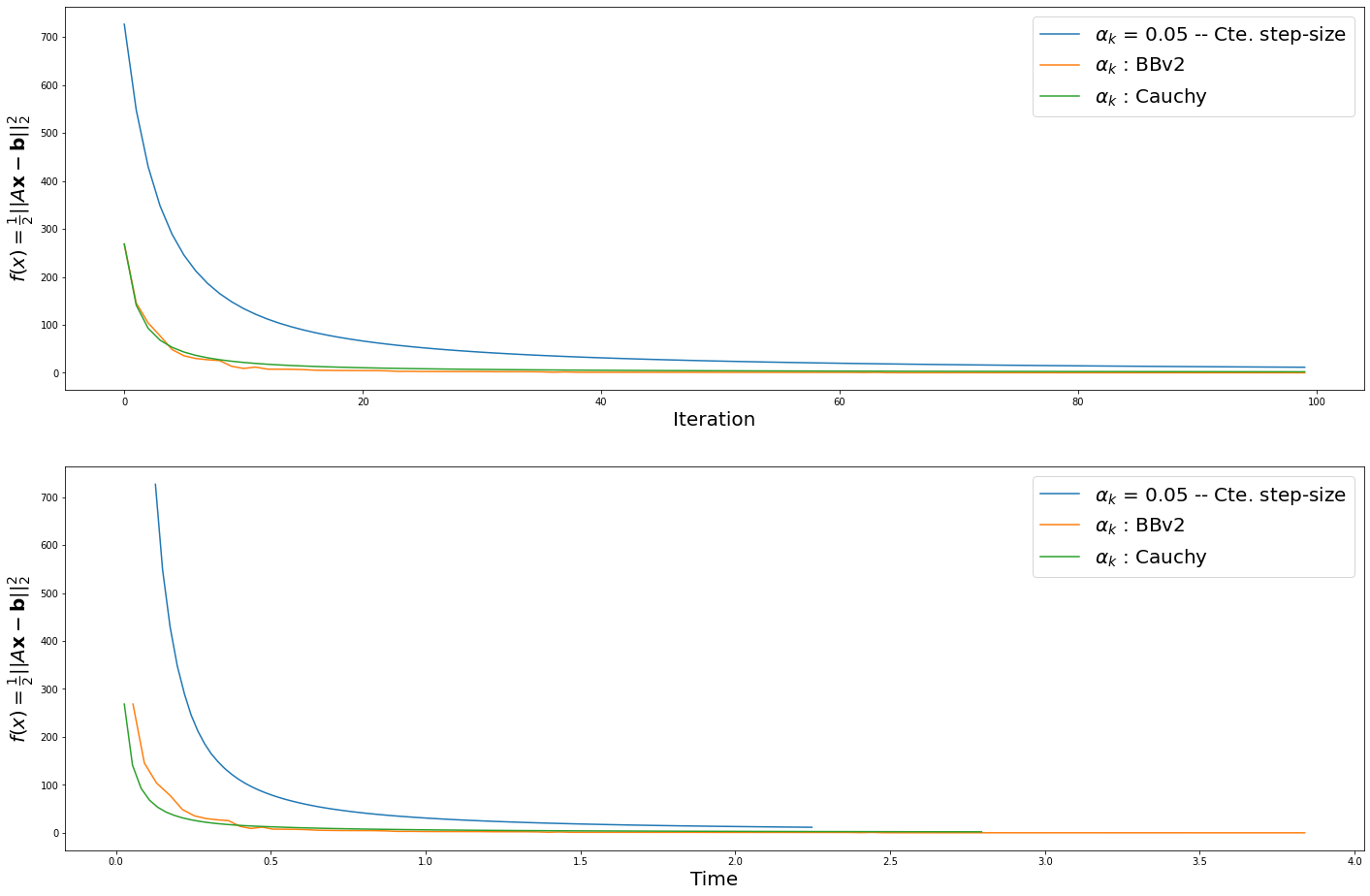
NOTE
Adaptive faster iteration
Constant faster time-performance